Accurate detection of heavy rail surface defects is crucial to both the economics and safety of railway transportation. However, the inspection of hot-rolled heavy rail presents obstacles that standard systems simply weren't designed to handle. The testing environment is unforgiving. Surface textures are inherently complex. Defects appear unpredictably across the rail face. Production lines run at high conveying speeds - continuously, around the clock.
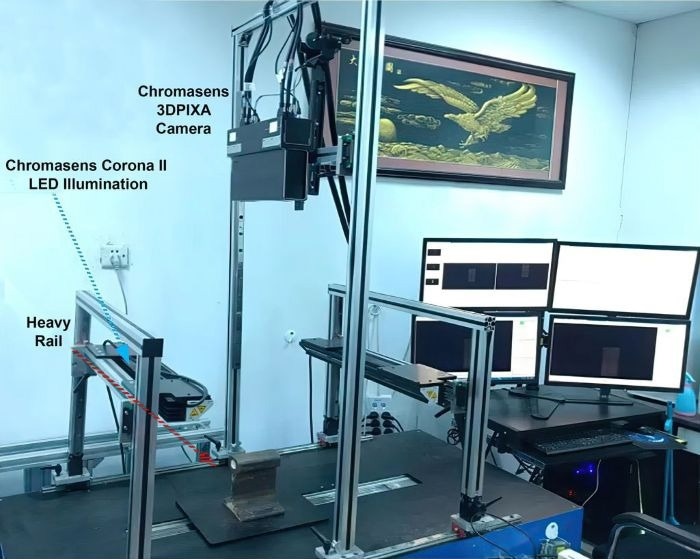 Image Credit: Ludong University
Image Credit: Ludong University
Today's heavy rail detection landscape offers three primary options: manual visual inspection, conventional non-destructive testing, and machine vision-based systems. Machine vision technology delivers what the others can't: non-contact inspection that eliminates wear and contamination concerns, seamless automation integration that scales with production demands, and proven robustness in the harshest industrial environments where traditional methods struggle.
The importance of detecting defects cannot be overstated. Defects like squats, shelling, and cracks can compromise the rail's integrity, leading to safety hazards and increased maintenance costs by accelerating track deterioration. Identifying and eliminating defects before rails enter service protects infrastructure investments, ensures passenger safety, and maintains operational reliability.
2D and 3D Inspection of Rail Surfaces
Along with traditional 2D machine vision, 3D measurement has been researched as a rail surface inspection tool, using either the line-structured light triangulation or stereo vision technique. Of the two, stereo vision offers the advantages of a larger field of view, ultra-high resolution, and higher acquisition speeds suitable for continuous operations. Stereo vision can also offers the advantage of simultaneously collecting corresponding color and texture information while obtaining 3D data.
While promising, the downside of 3D stereo vision in heavy rail inspection has been motion distortion. This can be caused by vibration in the transmission process and image stretching or compression due to frame rate mismatch between acquisition and rotary encoder. Installation error between the camera and the transmission motion device is another source of distortion.
Overcoming 3D Stereo Limitations
Researchers at Ludong University (Yantai, China), Northeastern University (Shenyang, China), and the Beijing Institute of Control and Electronics (Beijing, China) aimed to overcome motion distortion with the development of a binocular color line-scanning stereo vision system integrating a Chromasens 3DPIXA-Dual 70 μm 3D stereo line scan camera. By simultaneously obtaining 2D color images and 3D contour data, the binocular system demonstrated improved data accuracy and cost efficiencies.
The hardware of the binocular color line-scanning system consists of the Chromasens camera, a binocular integration device, a data acquisition and transmission cooperative control unit, and an experimental transmission motion platform. The system is built based on binocular vision measurement, while the triangulation principle is used to obtain RGB color images and for the calculation of 3D depth information.
The Chromasens 3DPIXA line scan camera features a trilinear CCD line sensor (RGB) that interacts with the PC through the CameraLink interface. In addition to its built-in 3D-API, the 3DPIXA supports software such as HALCON (MVTec) for application development. Optical resolution of the camera is 70 µm/pixels, and its maximum acquisition speed is 1.4 meters per second with a frame rate of 21 kHz. The camera adopts the principle of coplanar intersection measurement. As a result, when the field-of-view planes of two cameras coincide exactly, images can be simplified to a single, common geometric plane.
Achieving clear imaging of heavy rail surfaces demanded an optical trade-off: reducing the camera aperture to maximize depth of field and sharpness. A Chromasens Corona II LED bright field lighting scheme was selected, ensuring every surface irregularity, every potential defect, and every texture variation was captured.
Motion Distortion Correction
Eliminating motion-induced imaging distortion required mathematical precision. The solution as the development of a double-step cubature Kalman filter algorithm that iteratively resolves the nonlinear parameters inherent in motion distortion models. Comprehensive testing confirmed the algorithm's effectiveness across real-world production scenarios – delivering the geometric accuracy essential for reliable defect detection at high conveying speeds. The experiments showed that the accuracy of the data contained in images was improved by 57.3 % after correction.
Conclusion
Based on triangulation and stereo matching, the binocular color line-scanning system proved able to capture precise, high-resolution 2D images and 3D contour data of heavy rail surfaces. It also addresses motion distortion caused by camera installation errors and collaborative acquisition mismatch.