By Chesky
Self-driving cars once seemed futuristic – think Will Smith in I-Robot – but the future is upon us and such driverless vehicles are creeping onto our roads in Pittburg, Boston and Silicon Valley and many other cities. But how does an autonomous vehicle determine if someone is about to cross the road unexpectedly or when to stop at traffic lights? The answer is a remote sensing technology called LiDAR.
LiDAR - or LIght Detection And Ranging – was developed shortly after lasers in the 1960s and is perhaps the most important piece of hardware in the contest of developing self-driving cars. It uses light to measure objects several times in quick succession to chart their physical features.
A sensor continually shoots rapid laser pulses – around 150,000 pulses a second - at a target object which is reflected back to a sensor that measures the time taken for the pulse to return. The distance to the target is calculated using the speed of light to accurately gauge the distance travelled. The result is a complex three-dimensional map of the target object and its surface characteristics.
LiDAR was first used in meteorology by the American National Center for Atmospheric Research to measure clouds but has applications in geology, seismology, atmospheric physics and laser guidance to name a few. NASA’s Apollo 15 astronauts even utilised LiDAR to map the surface of the moon using a laser altimeter. It was first used in vehicles in the mid-2000s in the Grand DARPA Challenge - a race solely for autonomous cars funded by the US Defense Advanced Research Projects Agency.
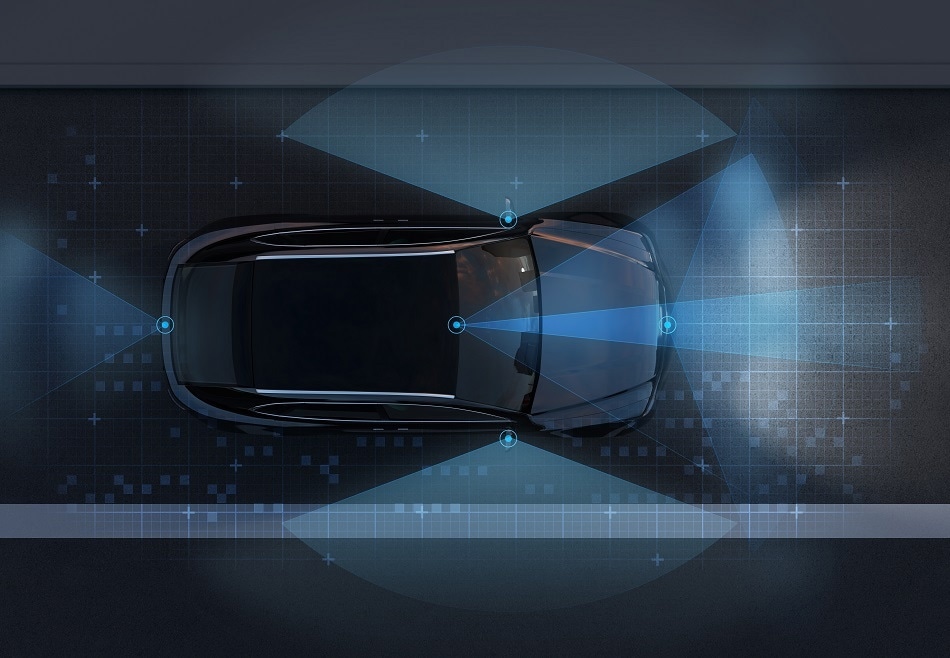
Google and Uber are just two of the many names developing driverless cars. The roofs of their vehicles are adorned a bulky box which turns nonstop giving 360° visibility and precise, in-depth data about the exact distance to an object to an accuracy of ±2cm. This box is the LIDAR system and consists of a laser, scanner and optics and a specialised GPS receiver, which is especially important if the system is moving.
LiDAR’s intended use was mapping and this is exactly why it is so beneficial in driverless cars: it is used to generate huge three-dimensional maps that a car can then circumnavigate. By employing LIDAR to chart and navigate an environment, a driverless car is able to determine whether there is a stop sign or traffic light ahead. Recent advances in LiDAR – higher resolutions and longer-range operation - mean that it is now also capable of detecting and tracking moving pedestrians and cyclists.
Of course, LiDAR isn’t the whole story. While it might identify the objects, the car’s computer predicts how the object might behave and therefore how it should ‘drive’ the car. It is this predictability which has allowed developers to make such progress over the last five years.
LiDAR is still relatively young in terms of its use in autonomous vehicles, but it is considered critical to its success. Other companies, like Tesla, believe the job can be done by cameras or radar but neither offer the superior qualities of LiDAR. Radar is reliable but the resolution is too low and it isn’t able to distinguish arms and legs for example, while cameras have the detail but would require sophisticated machine-learning-powered software to translate two-dimensional images into three-dimensional understanding.
Despite being on the verge of commercialisation, LiDAR is still underdeveloped and expensive – the cheapest sensor on the market costs around $4,000. And there are still some challenges to overcome in making it workable; the sensors will have to withstand potholes in the road and extreme temperature so will have to be robust and reliable, as well as having a long lifespan. In short, there is still much to improve, but for now it seems LiDAR is essential for driverless cars.
References and further reading
https://news.voyage.auto/an-introduction-to-lidar-the-key-self-driving-car-sensor-a7e405590cff
https://gisgeography.com/lidar-light-detection-and-ranging/
https://www.wired.com/story/lidar-self-driving-cars-luminar-video/
https://www.ff.com/us/futuresight/what-is-lidar/
Disclaimer: The views expressed here are those of the author expressed in their private capacity and do not necessarily represent the views of AZoM.com Limited T/A AZoNetwork the owner and operator of this website. This disclaimer forms part of the Terms and conditions of use of this website.