One of the most challenging aspects of developing self-driving cars, particularly for vehicles that will be used in environments with mixed autonomous and manually operated vehicles, is developing sensor systems that can deal with the range of distances, weather, and light conditions that the vehicle will be exposed to.
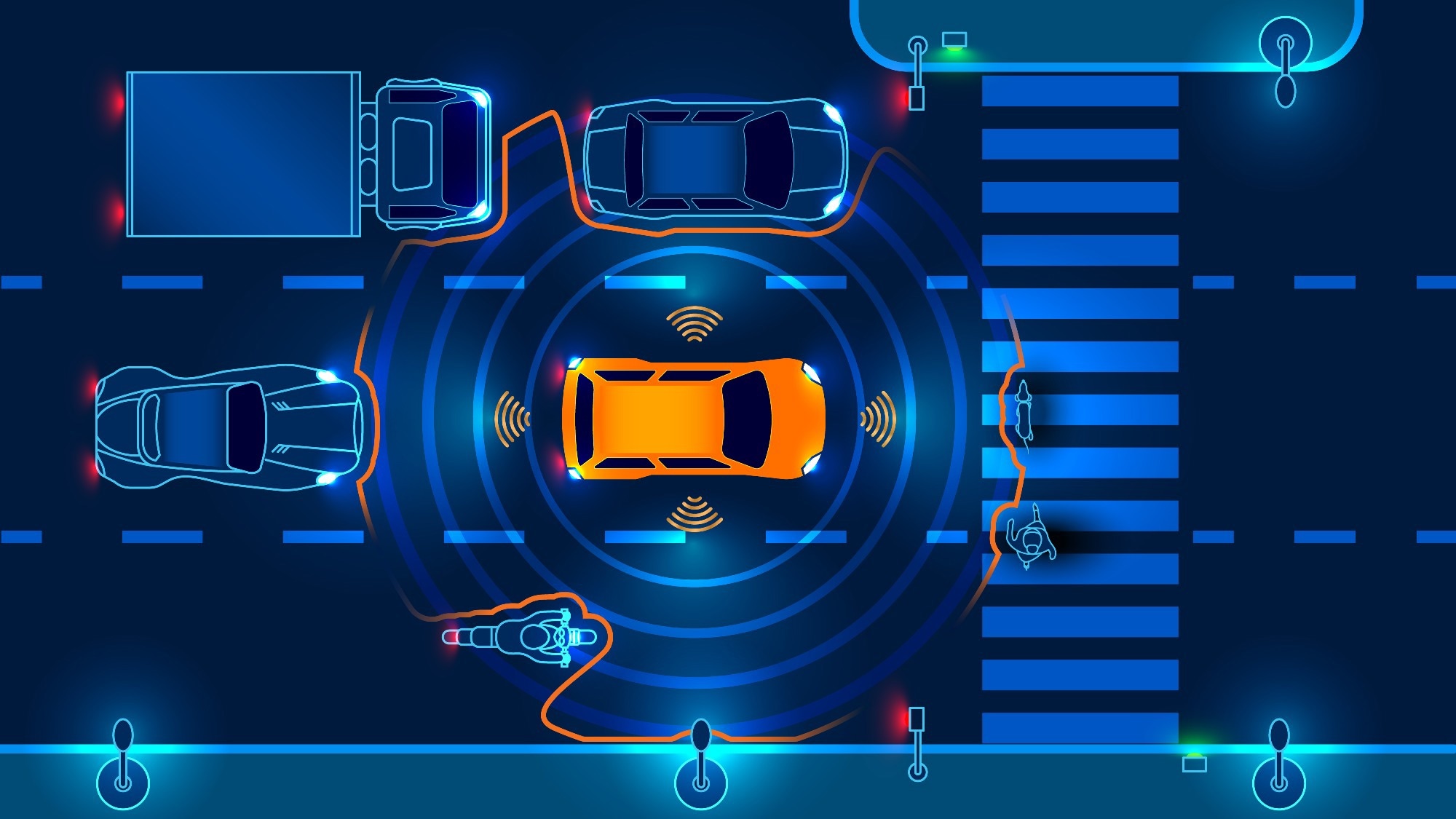
Image Credit: Andrey Suslov/Shutterstock.com
The sensor system on an autonomous vehicle acts as the machine vision for the vehicle. The sensors provide the image information to be analyzed so the vehicle can make decisions about which route to take, whether there are traffic signs to be obeyed, or whether the vehicle needs to take evasive action. Deep learning and other machine learning approaches are the most commonly used approaches for the analysis of image information for autonomous vehicles.
Most sensor systems are based on light detection and ranging (LIDAR) technologies. The advantages of LIDAR as an advanced driver assistance system are that it is faster than sonar-based systems and LIDAR is a higher frequency than microwave radiation so can be used to transfer information at higher data rates. Many systems also make use of radar and visual camera vision in conjunction with LIDAR systems to compensate for environmental conditions that are particularly problematic for a particular sensor type.
LIDAR technologies use laser sources to produce the electromagnetic radiation they use for scanning their environments. For autonomous vehicle applications, fast scanning and response times are critical for the safety and performance of the vehicle. Many autonomous cars have roof-mounted LIDAR units that continually scan their field of view to assess the external environment.
One of the challenges in processing that information is taking into account imperfections in the road surface that require a continual adjustment in the height information being processed. The constant processing and the large amount of sensor information required makes this a very high bandwidth problem.
Recent developments in laser steering technologies have made it possible to improve the scanning rates and scanning precision of LIDAR technologies, ultimately helping improve the safety of autonomous vehicles.
Are There Safety Improvements?
The recent developments from researchers at CEA-LETI have been focused on the use of microelectromechanical systems (MEMS) for creating an optical laser beam steering device. MEMS devices are on the micrometer length scale and are used in a number of industries for their small footprint and high performance.
The high degree of precision with which MEMS components can be controlled can be used to create beam steering arrays, such as optical-phased arrays, that can control even very small displacements in the beam pointing. Optical-phase arrays are particularly useful for autonomous vehicles as they do not contain any moving optical components so they are not as affected by vibrational instabilities that are highly problematic in moving vehicles.
Now the CEA-LETI team has been applying this technology for LIDAR beam steering devices. The work has already resulted in three patents and is a highly power-efficient way of controlling the beam steering when compared to conventional piezoelectric mirrors as well as a space-saving option.
A greater degree of scanning precision is essential for being able to detect very small height differences due to imperfections in the road surfaces or small uneven regions in the road or on sidewalks. Height differences are also important for a self-driving vehicle to recognize where the drivable road area is, as sidewalks or barriers are often used to mark the drivable area and where pedestrian areas are.
Future Developments
Other important optical developments for autonomous cars include completely changing the architecture used to control the beam pointing. Rather than using an approach based on moving mirrors or other components, researchers at the University of Texas have been developing a new type of optical device for LIDAR.
The full optical device consists of a photonic crystal cavity, which can be electrically tuned to change the beam pointing. The advantage of this approach is that it is even less bulky than mirrors and can also be used to achieve faster scan speeds. Combining this with a vertical-cavity surface-emitting laser (VSCEL) can be used to create a high-performance machine vision platform.
Image Credit: Dean Burton/Shutterstock.com
Other improvements are not just in the beam delivery or scanning systems for autonomous vehicle sensing systems but also in the beam transport optical technologies. Higher-power laser systems would have better performance for autonomous vehicle sensing but pose a risk to nearby pedestrians or other drivers.
More efficient coatings that are less absorbent and prone to overheating mean lower laser powers can be used without hampering the overall efficiency of the system. By combining lower laser power with automated beam shut-off and sensing capabilities for the LIDAR system, it is possible to create systems with improved optical safety for pedestrians.
Reliable and robust sensing and data processing are crucial in achieving road and pedestrian safety with autonomous vehicles. Improving optical components in LIDAR and other assistive machine vision technologies is essential to achieving that.
More from AZoOptics: What is Phase Contrast Microscopy?
References and Further Reading
Fujiyoshi, H., Hirakawa, T., & Yamashita, T. (2019). Deep learning-based image recognition for autonomous driving. IATSS Research, 43(4), 244–252. https://doi.org/10.1016/j.iatssr.2019.11.008
Royo, S., & Ballesta-Garcia, M. (2019). An Overview of Lidar Imaging Systems for Autonomous Vehicles. Applied Sciences, 9, 4093. https://doi.org/10.3390/app9194093
Zang, S., Ding, M., Smith, D., Tyler, P., & Rakotoarivelo, T. (2019). The Impact of Adverse Weather Conditions on Autonomous Vehicles. IEEE Vechicular Technology Magazine, 103–111. https://doi.org/10.1109/MVT.2019.2892497
Horvath, E., Pozna, C., & Unger, M. (2022). Real-Time LIDAR-Based Urban Road and Sidewalk Detection. Sensors, 22, 194. https://doi.org/10.3390/s22010194
Optics.org (2022), https://optics.org/news/13/11/32, accessed November 2022
Ang, Y. O. W., Hou, G. U. Z., Hang, X. I. Z., Won, K. Y. K., Lanche, P. I. B., Riesault, N. I. T., U, K. Y. S. I. K. Y., & Ing, M. C. W. U. (2019). 2D broadband beamsteering with large-scale MEMS optical phased array. Optica, 6(5), 557–562. https://doi.org/10.1364/OPTICA.6.000557
Disclaimer: The views expressed here are those of the author expressed in their private capacity and do not necessarily represent the views of AZoM.com Limited T/A AZoNetwork the owner and operator of this website. This disclaimer forms part of the Terms and conditions of use of this website.