Each component displays some form of texture and roughness at its surface. These parameters differ due to varying production techniques and the part structure itself. To understand the surface of a component in a better way and to manage the production process to the extent required in current applications, it is vital to measure the surface in two and three dimensions (2D and 3D).
The surface texture parameters can be categorized as follows:
- Roughness
- Waviness
- Spacing
- Hybrid
Terminology and Surface Parameters
The wavelength at which the surface structure is differentiated between waviness data and roughness is measured by a cutoff filter. Selecting the correct filter cutoff in software is vital for precise measurements. Areal is a 3D surface area, profile is a 2D slice through an area, and evaluation length is the area from which information is obtained.
A 2D area corresponds to the slice length as defined in a filled plot or a 3D area, and to the instrument’s field of view. Cutoff length or sampling length is the area selected for assessing the roughness parameter with the cutoff wavelength. Surface unevenness spaced beyond the sampling length is considered as waviness. Center line or mean line is a straight line that is created by calculating a weighted average for each data point, resulting in equal areas below and above the line. Surface texture is a term associated with the surface’s topography, showing certain deviations. These deviations include roughness and waviness and are characteristics of the real surface.
Apart from these, hybrid parameters are combinations of spacing and roughness parameters. Roughness parameters are levels of non-periodic, finer unevenness in the surface texture, caused during the process of manufacturing. Spacing parameters are a measure of the horizontal or lateral periodic characteristics of the surface texture. Waviness parameters define a larger component of surface texture on which roughness is overlayed.
Roughness Parameters
The largest set of parameters, roughness parameters, includes:
- Areal flatness deviations (ISO flatness)
- Swedish height (H)
- Total peak-to-valley height (Pt ISO)
- Base roughness profile depth (R3z ISO)
- Base roughness depth (R3z)
- Arithmetical mean deviation (Ra)
- Maximum peak-to-valley profile height (Rmax ISO)
- Kurtosis (Rku)
- Mean peak profile height (Rpm ISO)
- Highest peak (Rp)
- Maximum peak-to-valley height (Rt (PV)
- Root-mean-square (rms) roughness (Rq (rms)
- Mean peak-to-valley roughness (Rtm)
- Mean peak-to-valley profile roughness (Rtm ISO)
- Mean valley profile depth (Rvm)
- Lowest valley (Rv)
- Maximum peak-to-valley roughness
- Average peak-to-valley profile roughness (Rz ISO)
- Ten-point height (Rz)
- Total peak-to-valley areal height (SPt ISO)
- Maximum peak-to-valley height (SRmax ISO)
- Base roughness areal depth (SR3z ISO)
- Mean peak areal height (SRpm ISO)
- Mean valley areal depth (SRvm ISO)
- Mean peak- to-valley areal roughness (SRtm ISO)
- Average peak-to-valley areal roughness (SRz ISO)
- Average radial peak-to-valley areal roughness (SRz)
- The average of individual Rz results, determined by slicing the data array in the x-axis (SRzX), and the average of individual Rz results, determined by slicing the data array in the y-axis (SRzY).
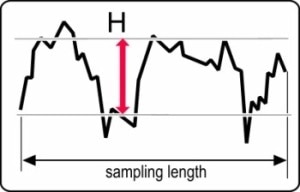
Figure 1. Sampling length
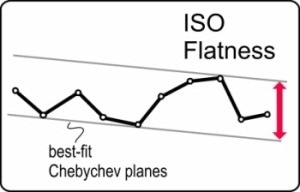
Figure 2. ISO flatness
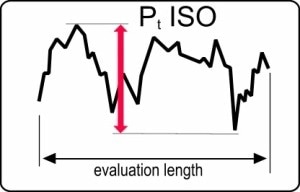
Figure 3. Pt ISO
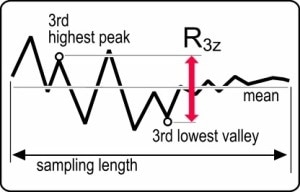
Figure 4. R3z
Waviness Parameters
Wq is the root-mean-square roughness of all points from a plane, fit to the waviness data. Wa is the average roughness or average deviation of all points from a plane fit to the waviness data. Wy (Wmax) is the maximum height of the waviness data.
Spacing Parameters
Pc (Peaks) is the number of peaks contained in the analysis. Peak spacing refers to the average distance between peaks. Peak density refers to the number of peaks per unit area. S is the average spacing between local peaks across the evaluation length, and Sm is the average spacing between peaks at the mean line over the evaluation length. Summits are the number of summits contained in the analysis. Summit density refers to the number of summits per unit area, and summit spacing means the average distance between summits. Valleys are the number of valleys present in the analysis. Valley density refers to the number of valleys per unit area. Valley spacing refers to the average distance between valleys.
Hybrid Parameters
Δa (Slope Ra) refers to the arithmetic average surface slope of the entire data matrix; Δq (Slope rms) refers to the geometric average slope of the entire matrix; Δtm (Slope Rtm) refers to the average peak-to-valley slope of nine sample areas on the entire data matrix; Iq is the root-mean-square deviation of all points from a plane fit to the input data; Ia refers to the average deviation, or average surface height, of all points from a plane fit to the input data; Iy (Imax) is the maximum height of the input data; Rvolume is the volume of the roughness data, as specified by software as above or below the surface; RSurfAreaRatio refers to the ratio of roughness surface area to the planar area taken up by the data; ISurfAreaRatio refers to the ratio of input surface area to the planar area taken up by the data, and WSurfAreaRatio is the ratio of input surface area to the planar area taken up by the data. Other hybrid parameters include bearing ratio parameters such as Rk, Tp, Rvk, Rpk and so on.
Optical profiler | 3D measurements of surface roughness better than stylus profilometers
Conclusion
The lists of surface texture parameters mentioned above are important to understand a component’s surface and to manage the production process to the extent required in present applications.

This information has been sourced, reviewed and adapted from materials provided by Zygo Corporation.
For more information on this source, please visit Zygo Corporation.